

Para el sistema mostrado en la figura $\ref{caso}$. Se busca lo siguiente:
El caso de estudio es el sistema de Ziegler mostrado en la figura 1.
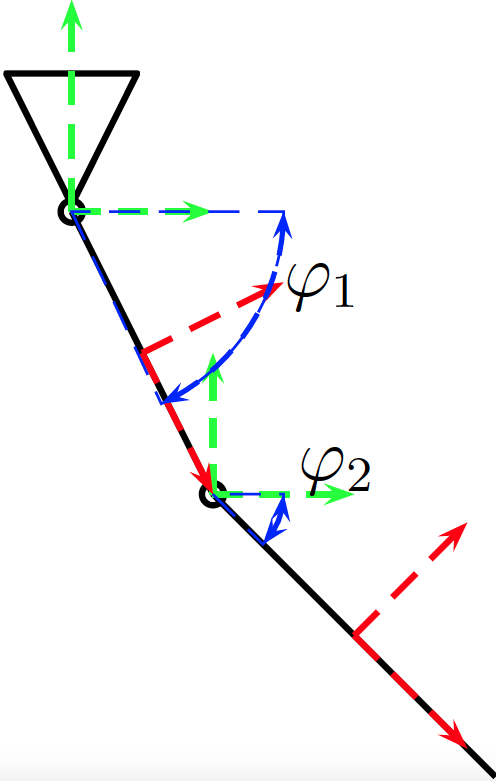
*Fig1: Caso de Estudio*
Para obtener la ecuación de movimiento utilizamos un método energético como la ecuación de Lagrange:
La energía cinética del sistema es:
En donde $J_{1}=\frac{1}{3}m_{1}L^{2}$ y $J_{cg2}=\frac{1}{12}mL^{2}$
Mientras que la posición del centro de gravedad del cuerpo 2 en cada instante es:
De tal forma que la velocidad del centro de gravedad de la barra 2 sería:
Como $m_{1}=m_{2}$, $L_{1}=L_{2}$, $c_{1}=c_{2}$, entonces:
Mientras que para la energía potencial se tiene:
Para calcular la fuerza generalizada producida por la carga $P$ se implementa el principio de los trabajos virtuales:
Entonces:
De tal forma que a partir de la ecuación \eqref{momentos} podemos deducir lo siguiente:
Las ecuaciones de movimiento del sistema a partir de la ecuación \eqref{lagrange} son:
Mientras que la segunda ecuación sería:
Resumiendo, las ecuaciones que gobiernan el movimiento del sistema serían las siguientes:
Las ecuaciones \eqref{ecmov1} y \eqref{ecmov2} representan las ecuaciones de movimiento del sistema NO lineales. Si ahora linealizamos respecto a la posición $(\varphi_{1},\varphi_{2})=(0,0)$. Obtenemos lo siguiente:
El sistema en forma matricial sería el siguiente:
Si descomponemos la matriz en matriz simétrica y antisimétrica:
De tal forma que el sistema de ecuaciones quedaría de la siguiente forma:
Para una solución de la forma $\textbf{u}=\textbf{U}e^{\lambda t}$:
Resolviendo el problema de valores característicos, los eigenvalores serían:
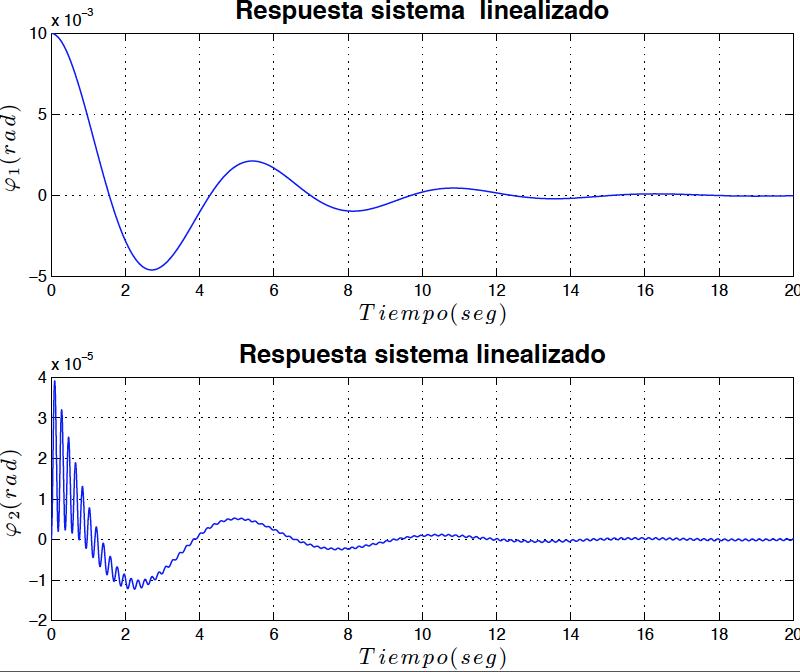
A partir de las expresiones para los valores de $\lambda$ en las ecuaciones \eqref{eigen6} se puede concluir que el sistema se vuelve inestable para valores de $P>100$ esto utilizando valores de $k=100$, $m=0.3$ y $L=1$. Para comprobar esta conclusión se procedió a resolver numéricamente el sistema de ecuaciones linealizadas. Los resultados son mostrados en las figuras \ref{fig1}, \ref{fig2}, \ref{fig3} y \ref{fig4}.
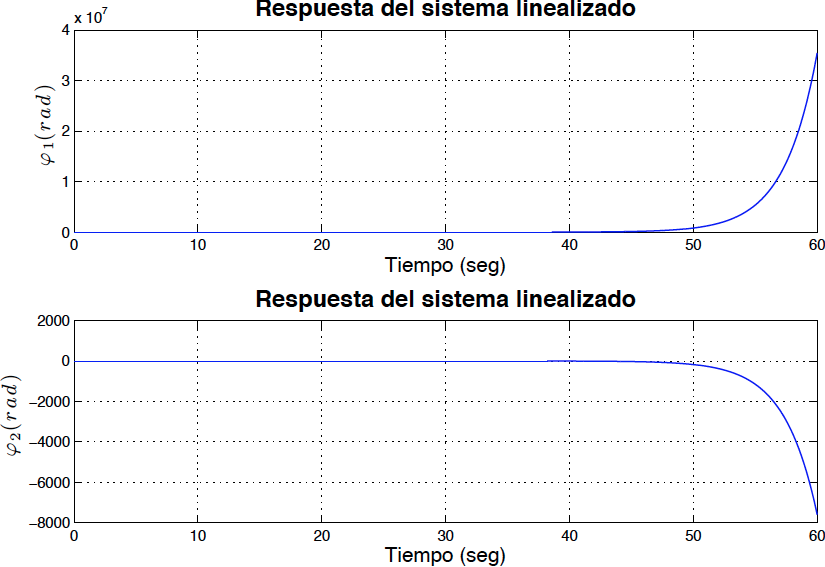
*Fig2: Respuesta del sistema linealizado para $P=100.1$ sin amortiguamiento (Inestable)*
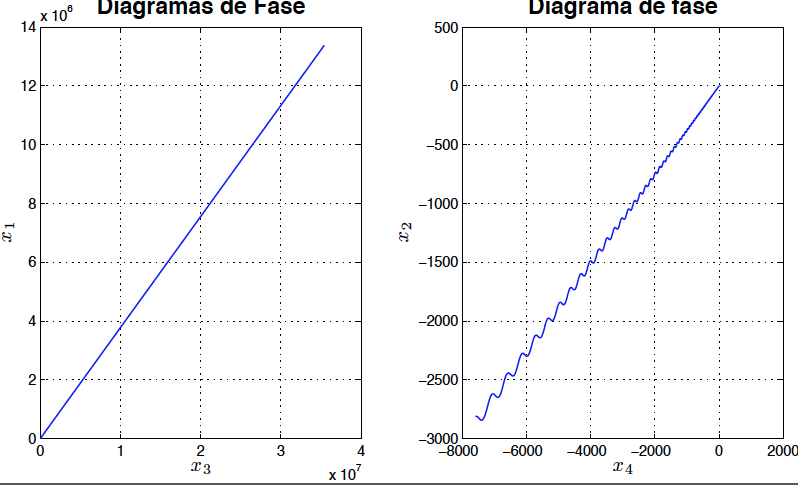
*Fig3: Diagrama de fase del sistema linealizado para $P=100.1$ sin amortiguamiento (Inestable)*
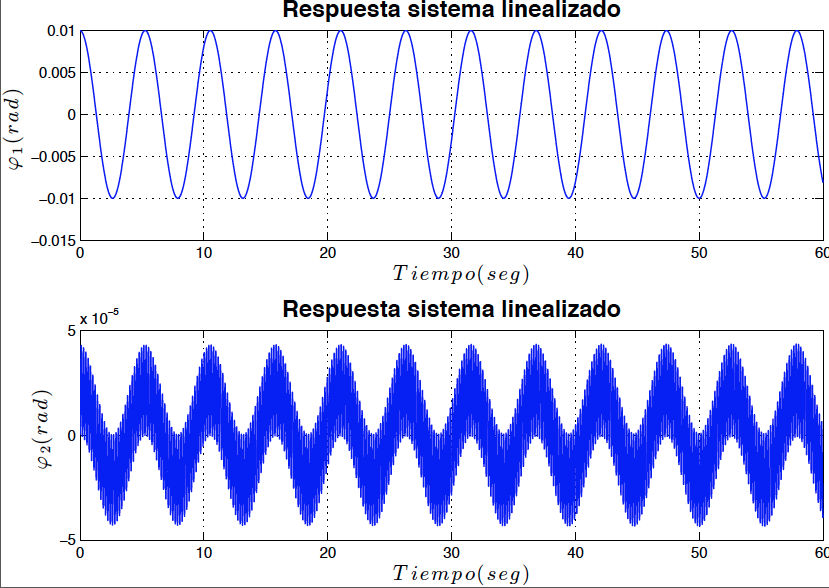
*Fig4: Respuesta del sistema linealizado para $P=99$ sin amortiguamiento (Marginalmente estable)*
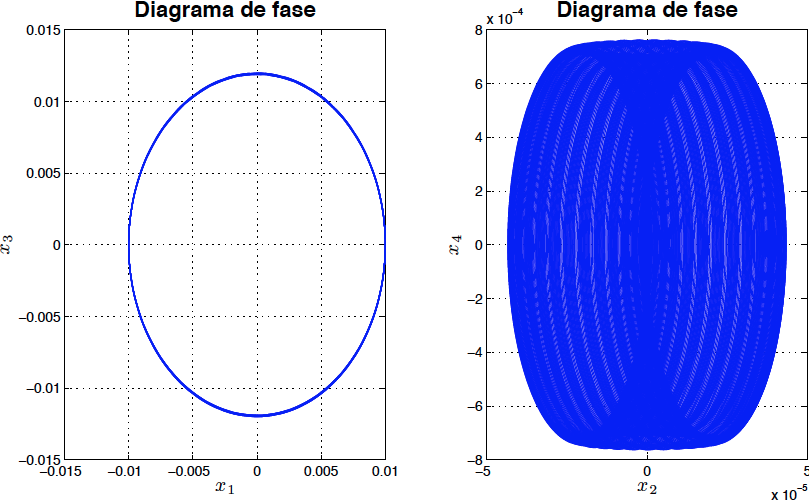
*Fig5: Diagrama de fase del sistema linealizado para $P=99$ sin amortiguamiento (Marginalmente estable)*
Para el caso en el cual se añada amortiguamiento al sistema $c=0.40$, las ecuaciones que gobiernan el movimiento serían las siguientes:
Resolviendo las ecuaciones \eqref{ecmov11} y \eqref{ecmov22} numéricamente utilizando MATLAB, los resultados son los mostrados en las figuras \ref{fig5} y \ref{fig6}
*Fig6: Respuesta del sistema linealizado para $P=99$ con amortiguamiento (asintóticamente estable)*
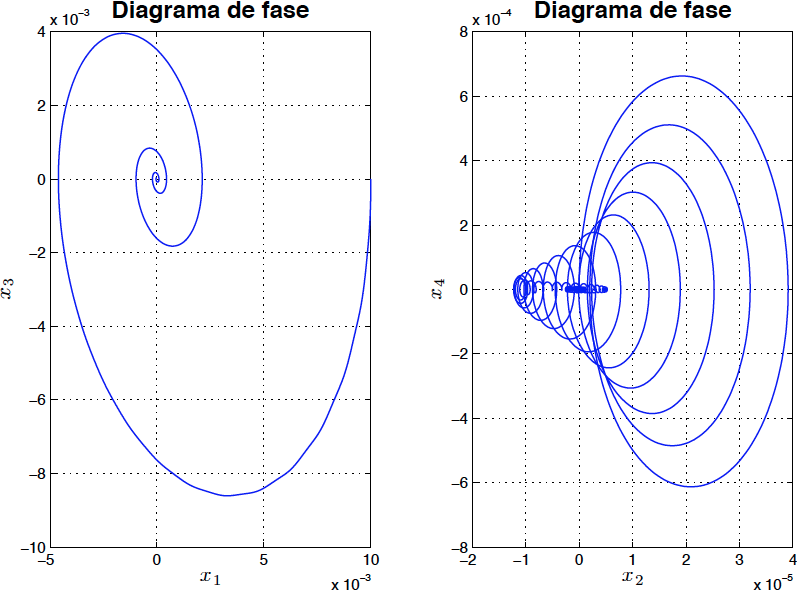
*Fig7: Diagrama de fase del sistema linealizado para $P=99$ con amortiguamiento (asintóticamente estable)*
Para analizar la respuesta del sistema ante las no linealidades el sistema de ecuaciones no lineales \eqref{ecmov11} y \eqref{ecmov22} se resolvió utilizando la función ODE45 de Matlab. Los resultados son mostrados en las figuras \ref{fig7} y \ref{fig8}.\[300cm]
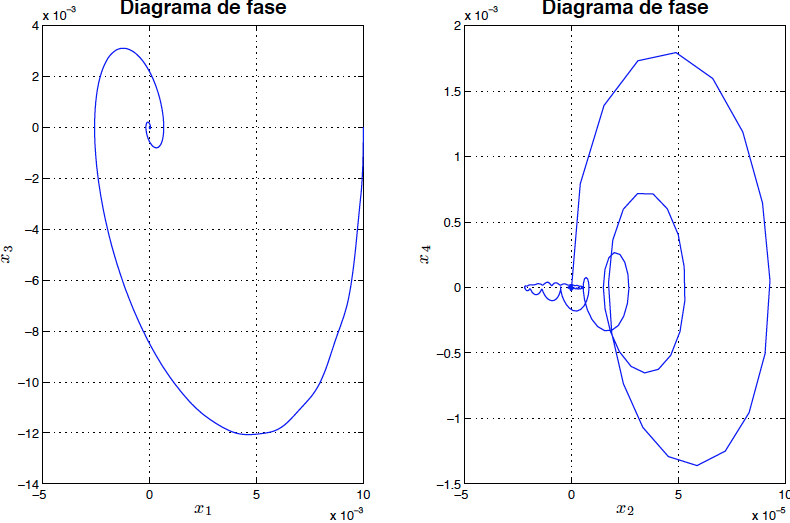
*Fig8: Diagrama de fase del sistema no linealizado para $P=99$ con amortiguamiento (asintóticamente estable)*

*Fig9: Diagrama de fase del sistema no linealizado para $P=99$ con amortiguamiento (asintóticamente estable)*
Código utilizado en MATLAB para resolver el sistema de ecuaciones \eqref{ecmov1lin}, \eqref{ecmov2lin}, \eqref{ecmov11} y \eqref{ecmov22}

Método Newton-Raphson por Jorge De La Cruz se distribuye bajo una Licencia Creative Commons Atribución-CompartirIgual 4.0 Internacional.
